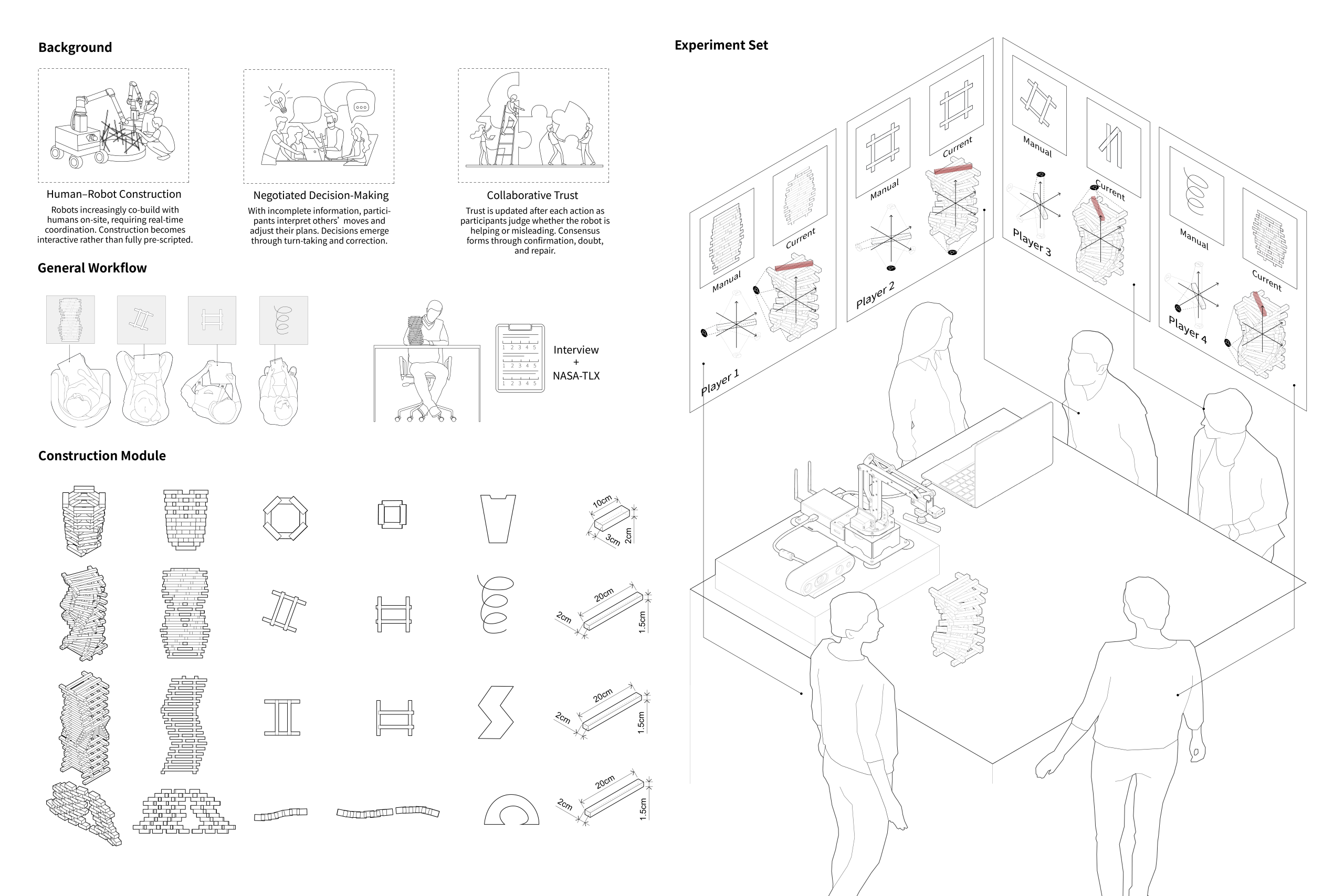
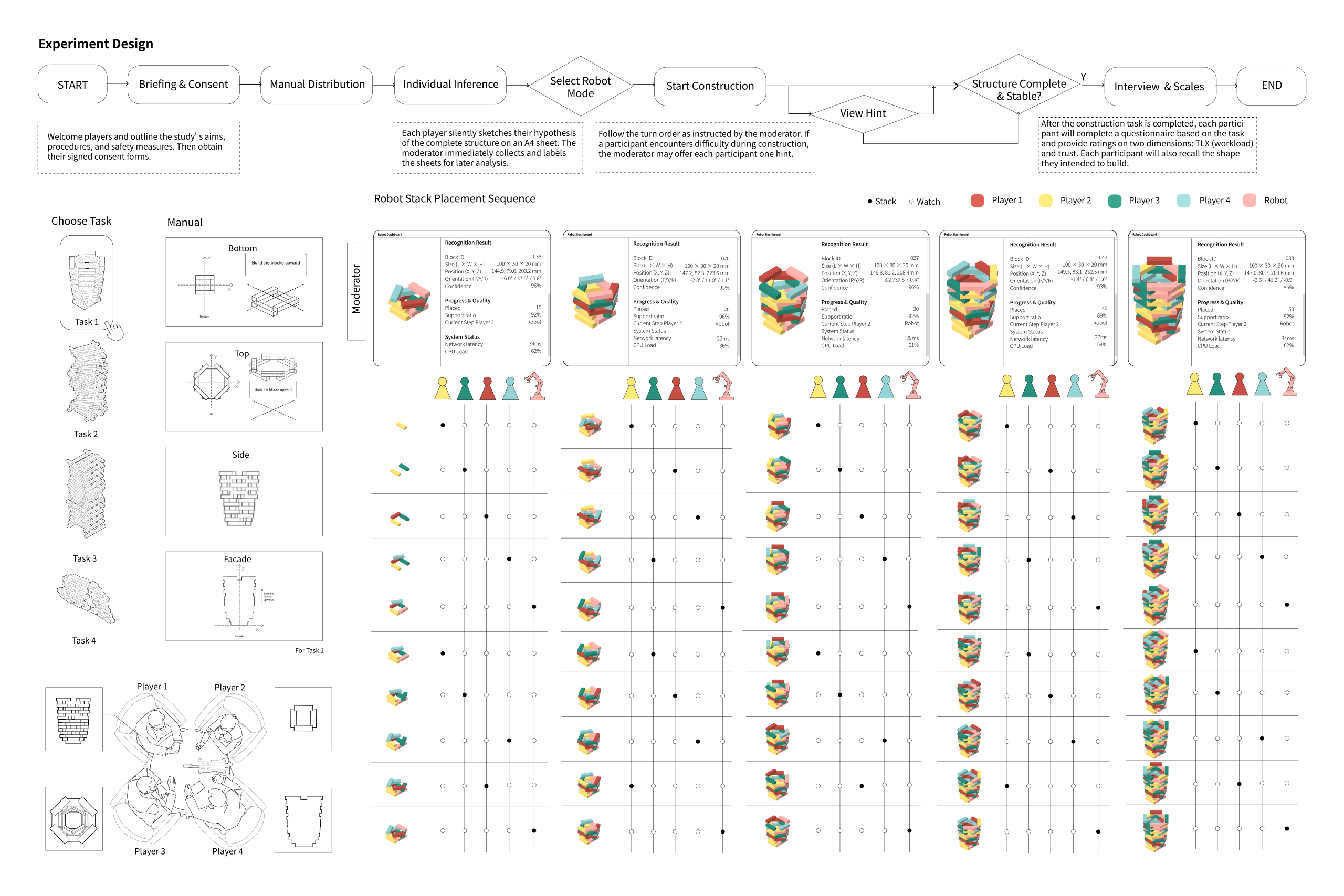
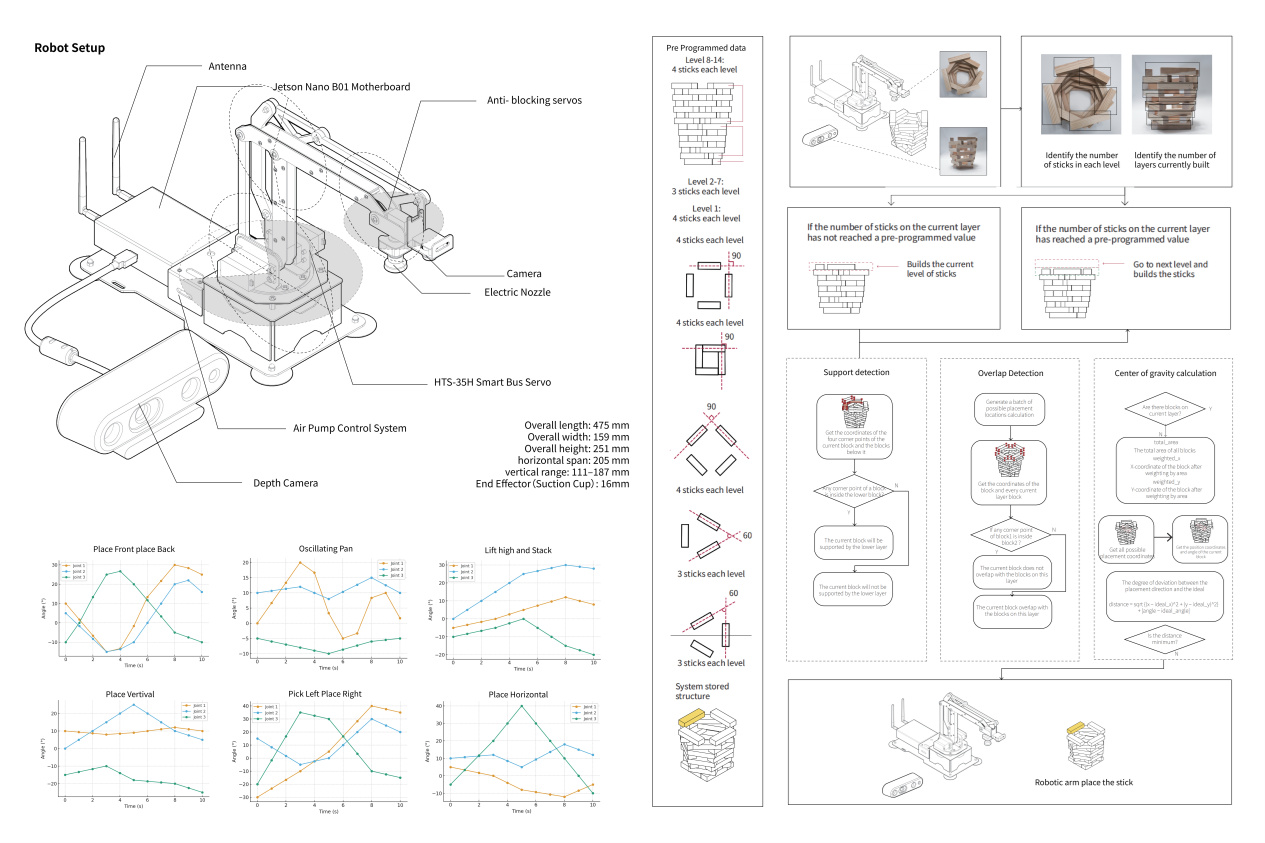
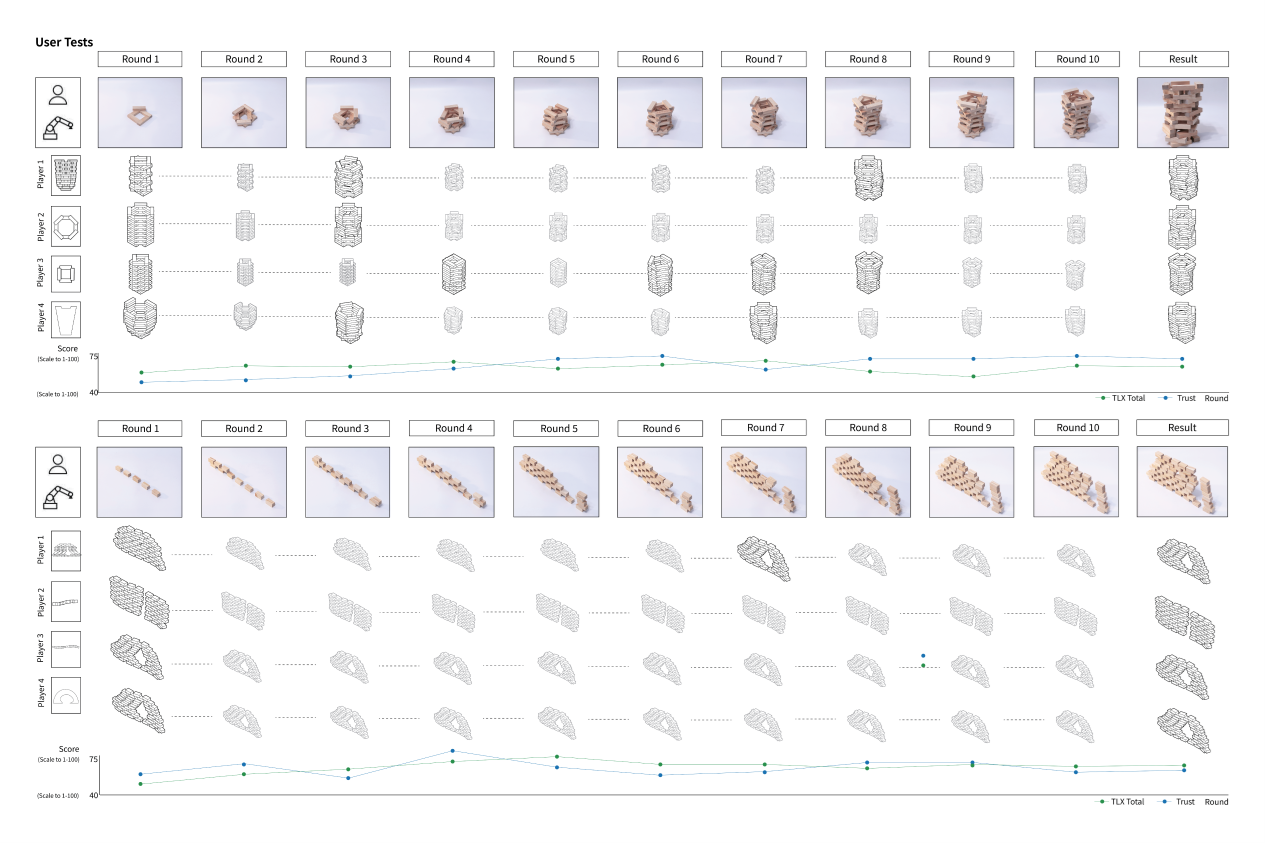
This project investigates how people form trust and shared understanding when co-creating with a robotic arm under incomplete information. Four participants play a turn-based construction game in which each person receives a manual containing only one face of the target structure, and must infer the full form from others’ placements and the robot’s actions. Technically, the system closes the loop from perception to execution: a vision pipeline detects the current block poses and tower state, a placement planner generates feasible candidates under support and collision constraints, and a similarity-based scoring function selects the next placement before transforming it into the robot coordinate frame for pick-and-place. Across trials, the robotic arm operates in two behavioral modes—Assist, which prioritizes placements that align with the intended geometry, and Distract, which introduces plausible yet misleading placements while remaining physically feasible. After the game, semi-structured interviews, NASA-TLX, and a memory-based reconstruction task capture how participants’ hypotheses evolve into negotiated strategies and final imagined designs. By framing collaboration as an iterative cycle of judgment, correction, and consensus-building, the project highlights how robots can reshape perception, trust, and cooperative design behavior.



yiweiwangpf_compressed11_23-scaled.png)