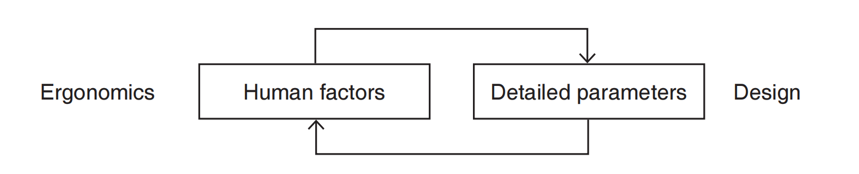
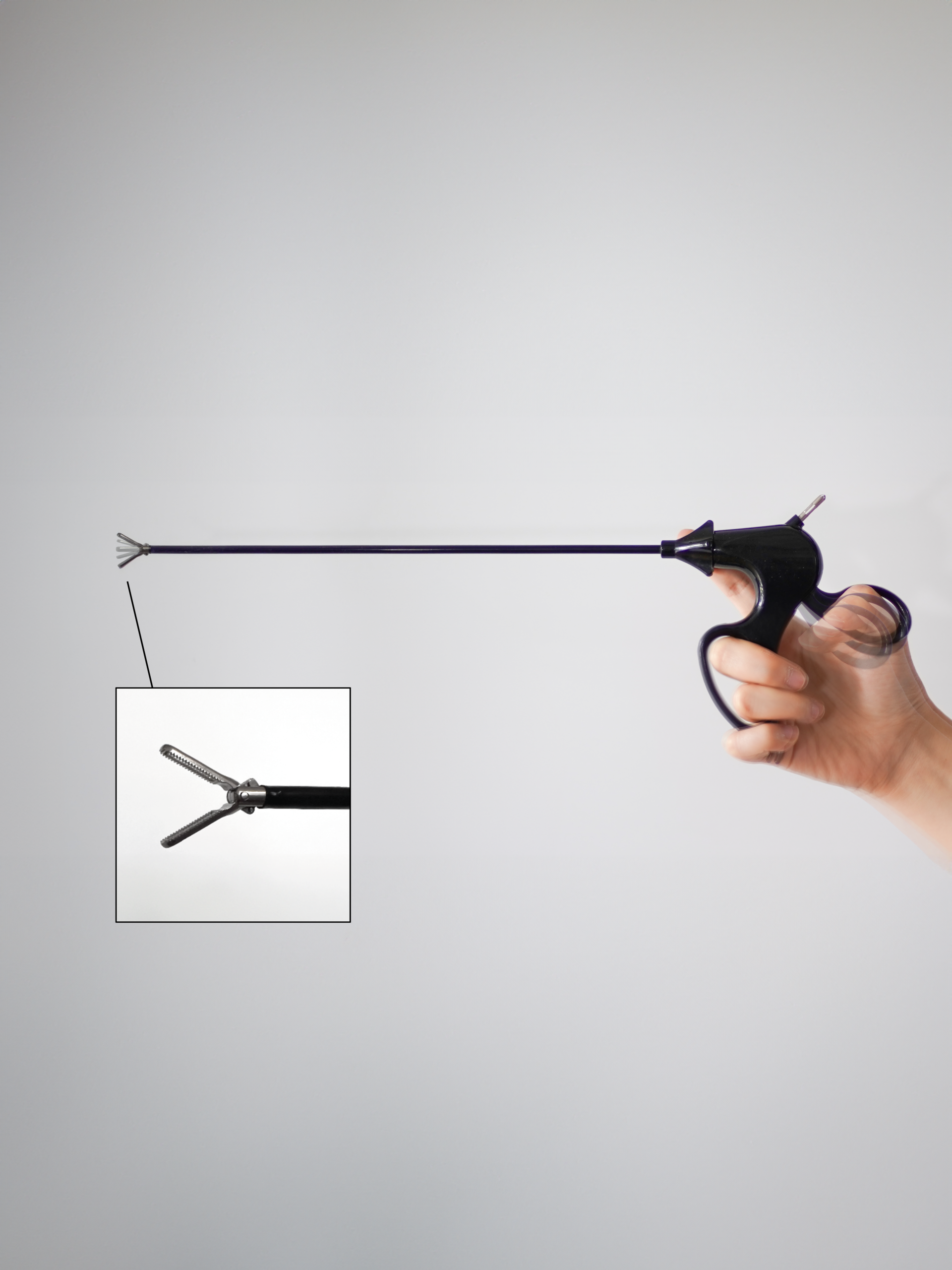
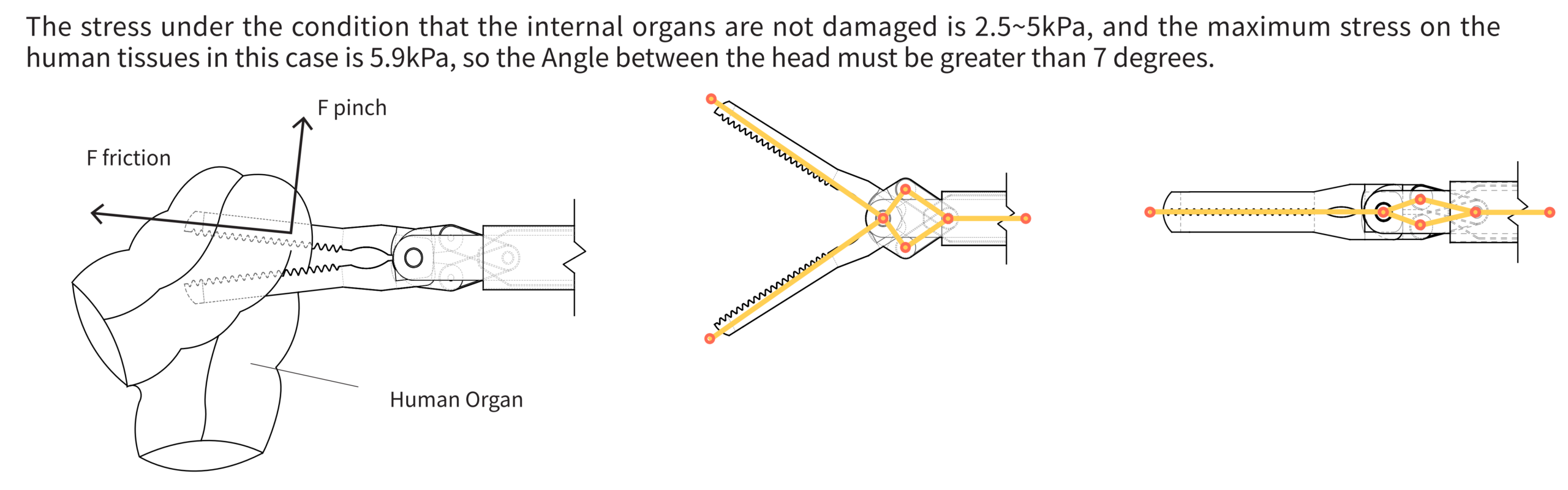
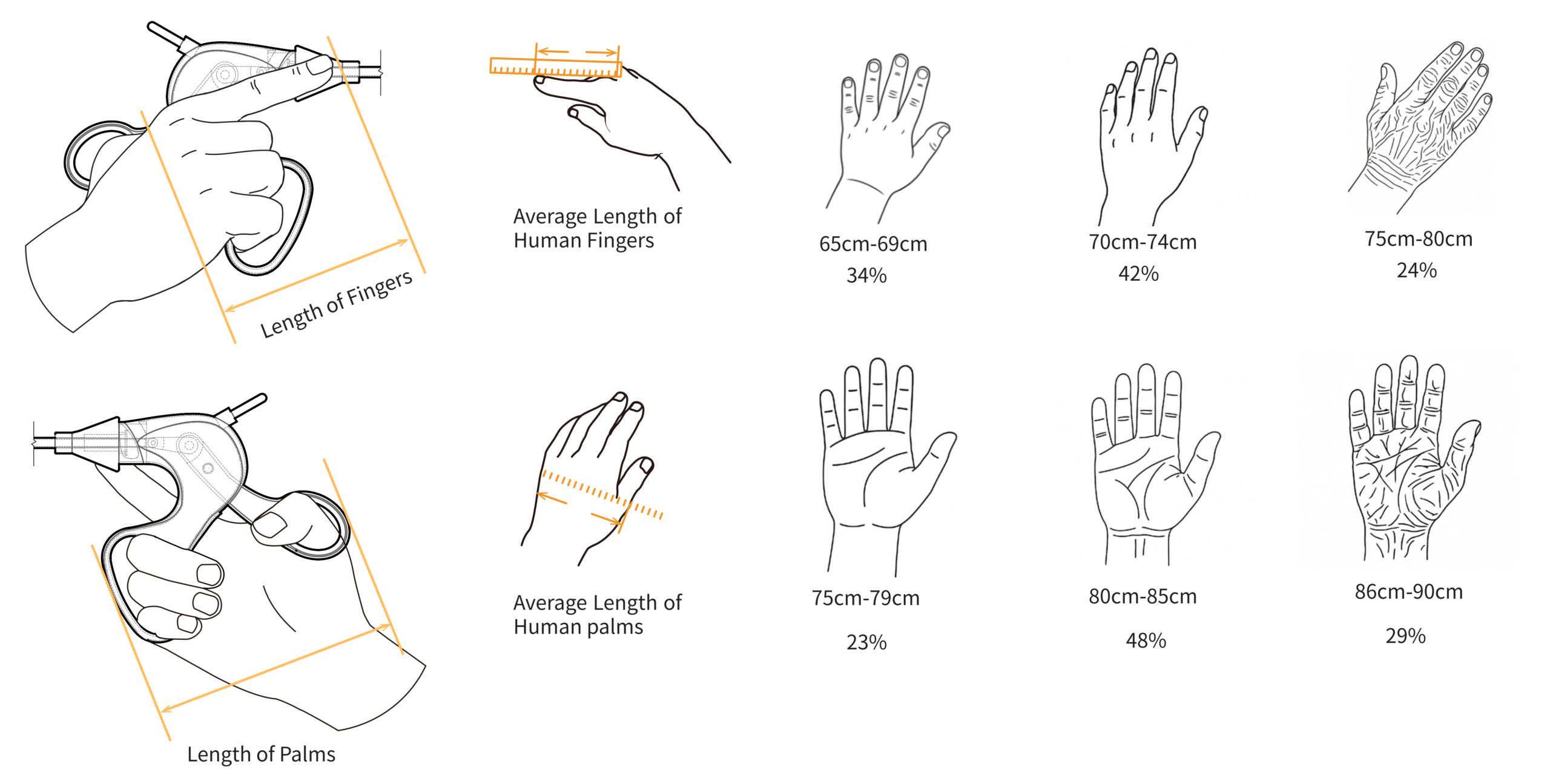
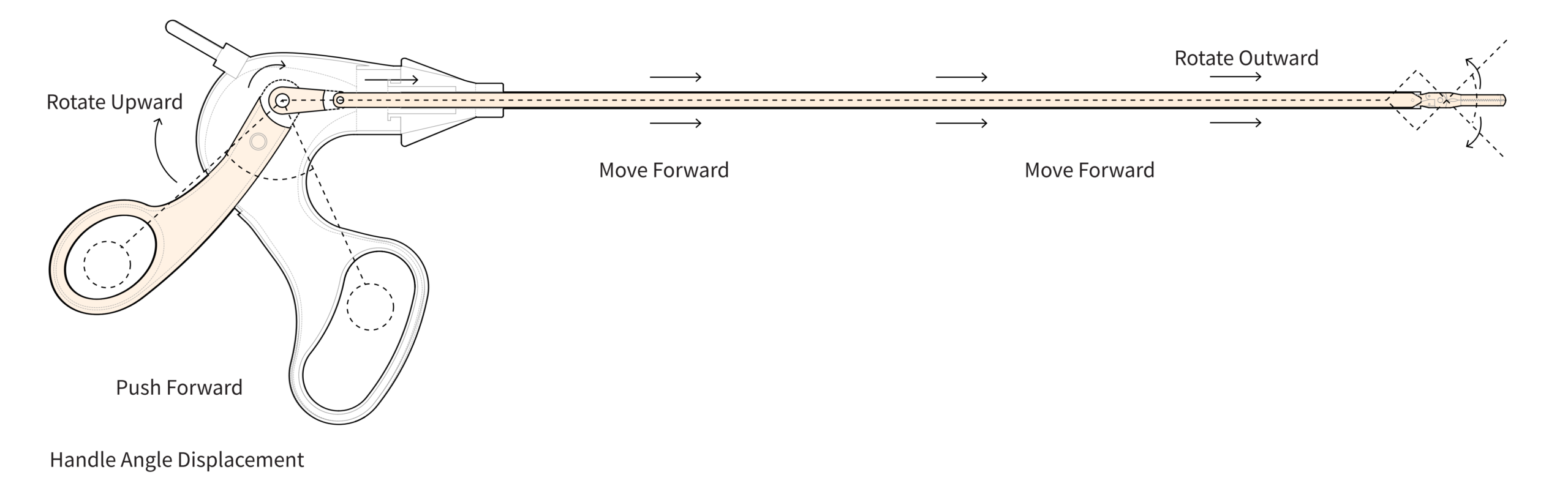
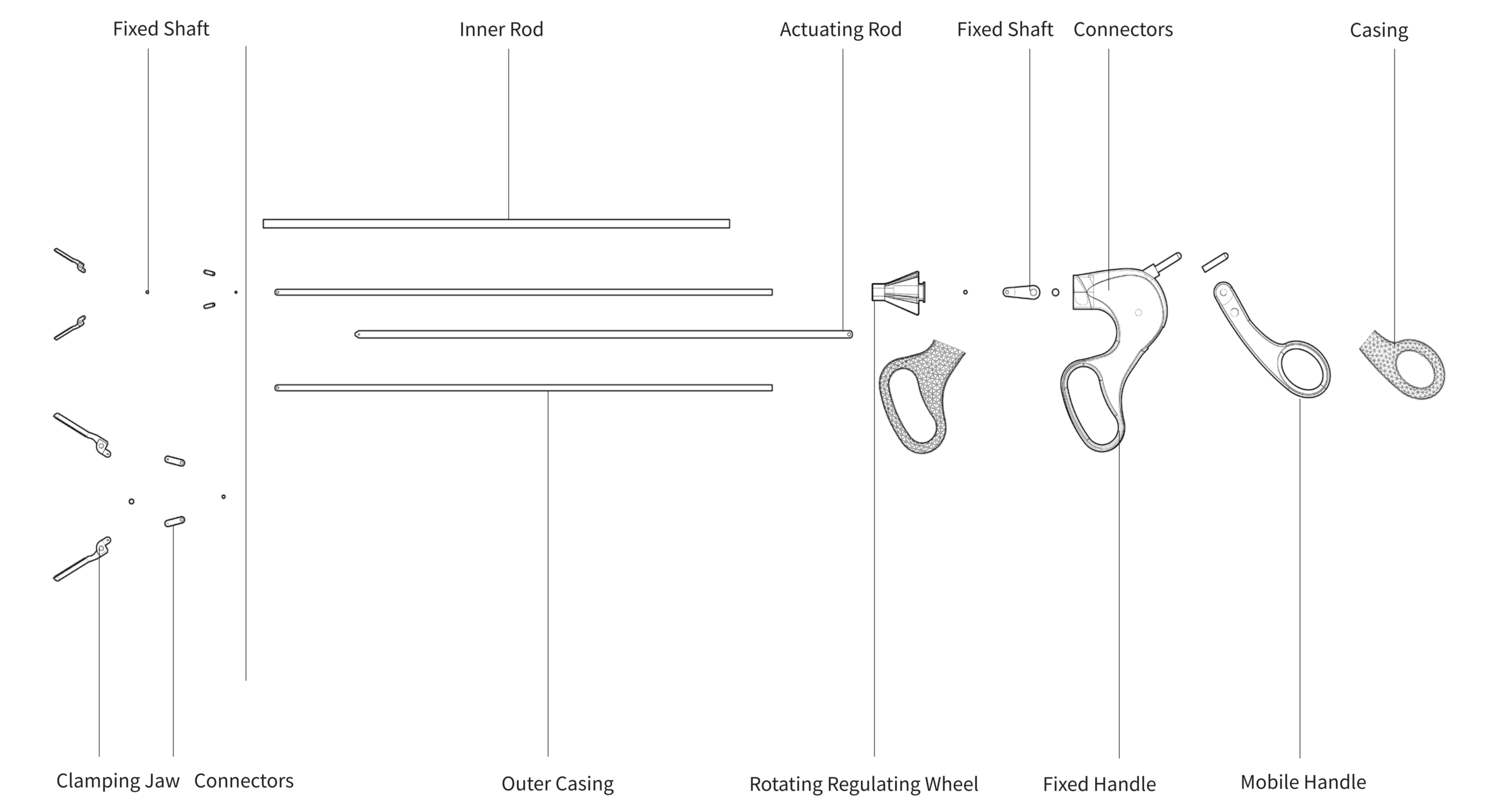
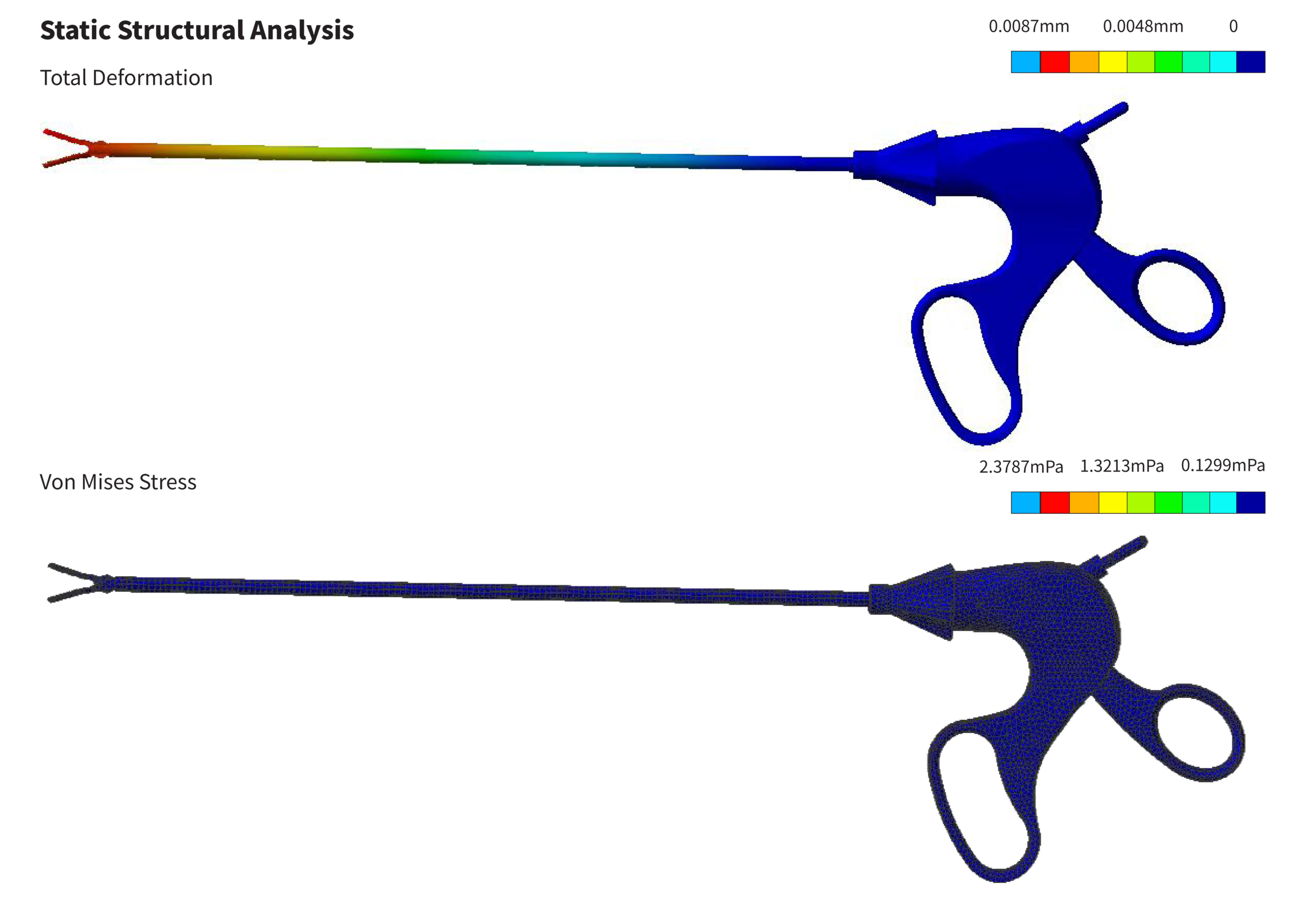
This project aims to design a new laparoscopic grasper that minimizes tissue damage and reduces fatigue. We studied existing graspers, analyzed their mechanical models, and identified key areas for improvement. Using software like Abagus and Adams, we performed finite element analysis and established the relationship between handle and jaw angles to optimize the design. The grasper was modeled in SolidWorks, ensuring ergonomic and functional efficiency. Our design uses PPSU material for the handle and shaft casing, with martensitic stainless steel for other parts.