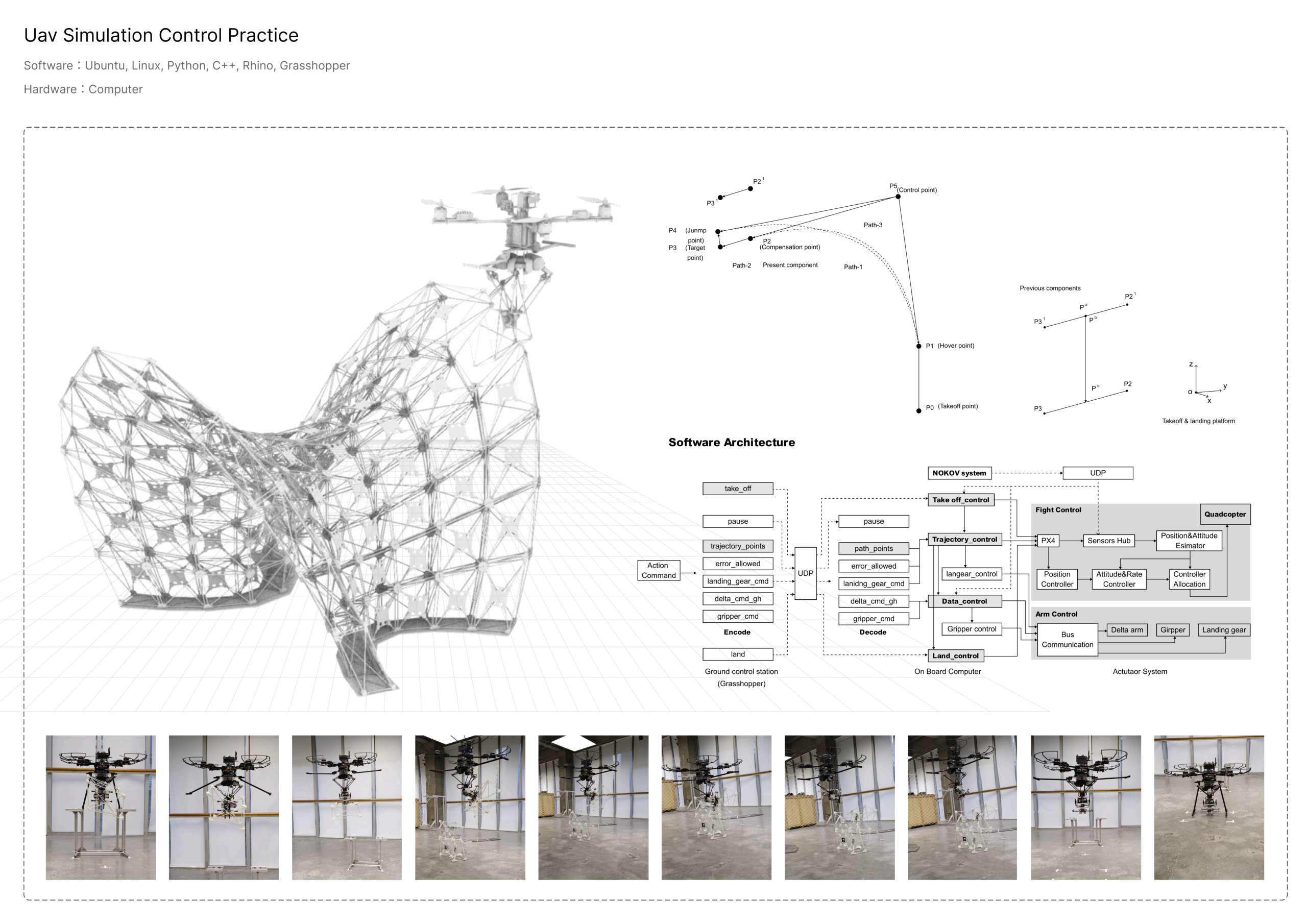
This project builds a Grasshopper-based control workflow to simulate and command UAV flight behaviors for construction tasks. Trajectory points and action commands are generated in Rhino/Grasshopper and transmitted via UDP to the onboard system (PX4 flight control), enabling repeatable sequences such as takeoff, hover, path tracking, and landing, with external positioning support for stable control. Based on a discrete construction logic, the target shell surface is divided into modular units (nodes + connectors) that can be fabricated and assembled step-by-step. The UAV performs “laying” operations by following planned paths and placing structural blocks in order, linking form-finding, module indexing, and real-world placement into one integrated workflow for rapid prototyping of lightweight shell structures.

yiweiwangpf_compressed11_57-scaled-e1769008855544.png)
yiweiwangpf_compressed11_57-1-scaled-e1769008954450.png)